专利详情
Patent Details
| 专利类别:实用新型 | 申请号: CN202122933528.2 | 申请日期:2021-11-26 |
| 公开日期:2022-06-24 | 专利名称: 一种安保巡检机器人的行走机构 | 发明人:张宝 龚倩 刘贵 游梦洁 张杰 |
| 法律状态:有效 | 申请人:新余学院 | 公开号: |
| 主分类号: | 优先权号: | 行业分类:G:物理 |
| 优先权日: | 专利权人:新余学院 | 评估得分: |
专利附图
Patent Picture
摘 要
Summary
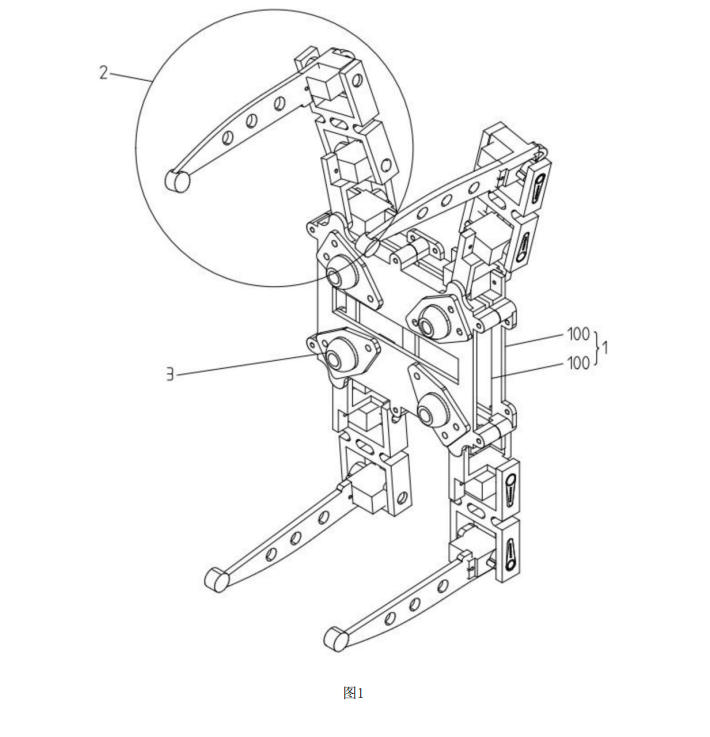
本实用新型涉及机器人技术领域,公开了一种安保巡检机器人的行走机构,包括:底盘、多个机械腿和多个万向轮,多个机械腿安装于底盘的四周,以带动底盘移动,多个万向轮分布于底盘的下端四角,本实用新型提供的一种安保巡检机器人的行走机构具有两种运动模式:轮式模式和足式模式,轮式模式时,机器人降低底板高度,使万向轮完全接触地面,拨动机械腿滚动万向轮达到运动的目的;足模式时,机械腿撑起,万向轮离开地面,机械腿以爬行方式运动。相对于传统单一的运动模式,此种轮足混合式安保巡检机器人的行走机构运行起来低耗、速度快且越障能力强,合理更换运动模式能极大提高工作效率。
交易流程
Trading Process

过户资料
Transfer Data

具体描述
Specific Description